Version 1
Version 3
Version 4
Fibo-Box Diseqc
Mechanical polarizer
Additional optocoupler board
Fibo-Box Version 4
The basics of Fibo-Box V4
|
The basics of the Fibo-Box V4 are different then the Fibo-Box V3. Fibo-Box V4 does not count the pulses from the satellite motor sensor circuit, but uses
an encoder to know the position of the azimuth and elevation motor. To be able to use the Fibo-Box V4 one encoders must be mounted on each motor. This does
not include the skew servo motor. For a mount with an azimuth, elevation and skew motor a total of two encoders is needed.
|
The encoder used
|
The encoder used in this part of the project is the HH-12 12 Bit 360° absolute rotary encoder sold by
kutz-b.de in Germany. They are sold
for 25 euro. The encoder HH-12 is a rotary position transducer with synchronous serial interface at the size of a 'standard' potentiometer. The encoder can
be read out for its position. This gives an advantage above a standard satellite motor sensor circuit, because the motor does not have to be powered to
know the current position. By using encoders in the Fibo-Box project the motors do not need anymore to be driven to a start position when the Fibo-Box was
disconnected from the power. The encoder has an absolute resolution of 0.088°.
|
|

|

|
But there is more
|
There is more to tell about this version of the Fibo-Box. The Fibo-Box V4 stores the satellite positions in the Fibo-Box V4 itself. Motor limits
can be set and these are stored in the Fibo-Box V4 as well. The Fibo-Box V4 can be controlled manually. This all means the Fibo-Box V4 can work
totally stand-alone. The Fibo-Box V4 can also be controlled by PC. There is a display on the front of the Fibo-Box V4 showing the current position. There
are no relays inside. The motors are driven by a motor driver circuit. The motor speed can be adjusted for each motor. Besides of that there is
also auto speed control when the dish is close to the position.
|
|
There are several types of satellite motors and several ways to mount the encoder on the motor. It is possible to adjust the configuration to
make the encoder work the other way round. The picture on the right shows the encoder mounted on a Fibo motor mount. The Windows software has
a auto calculation of all satellites by latitude and longitude (system alike Usuals).
|
|

|

|
The Windows software.
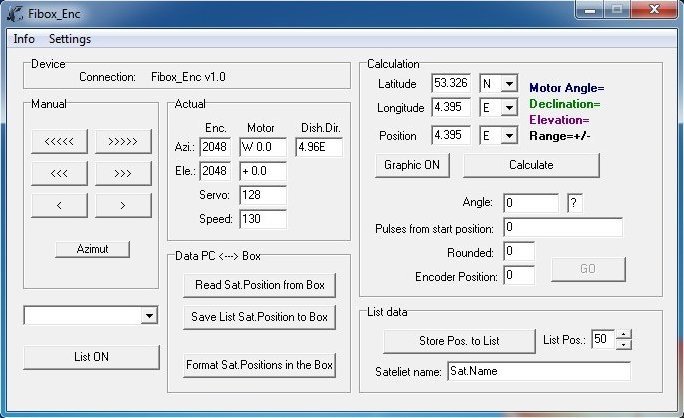
Azimuth control |
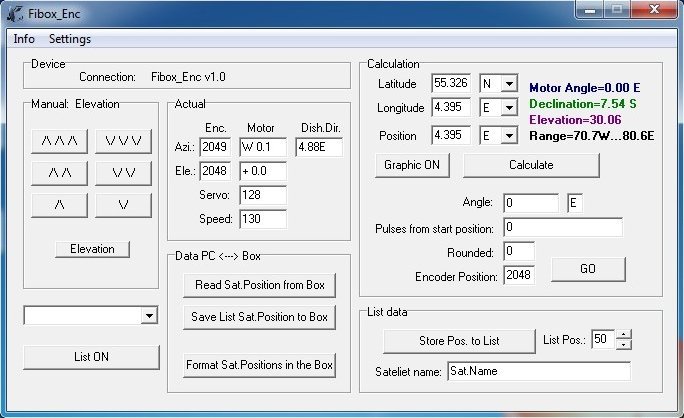
Elevation control |
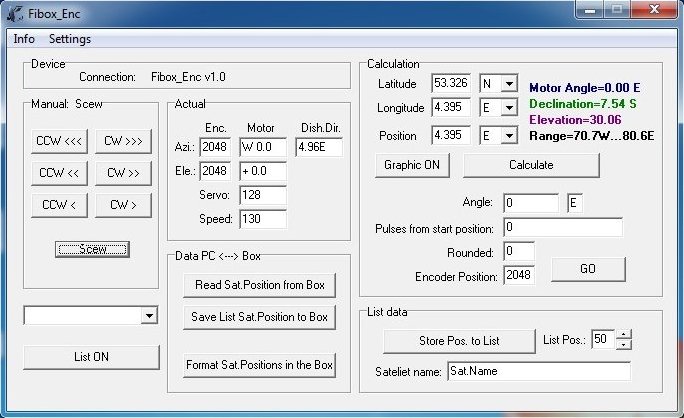
Skew control |

Motorspeed control |
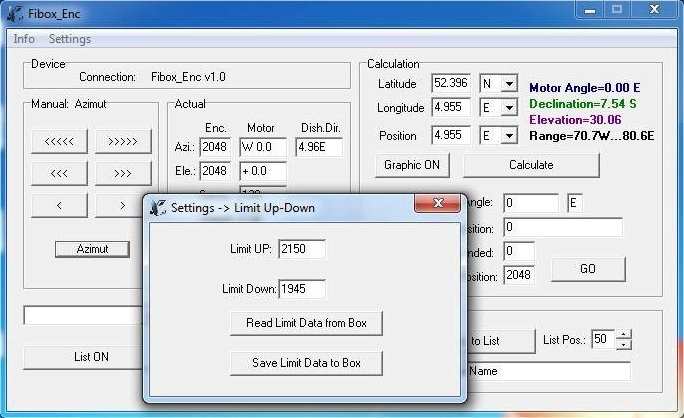
Setting the up-down limit |

Setting the east-west limit |
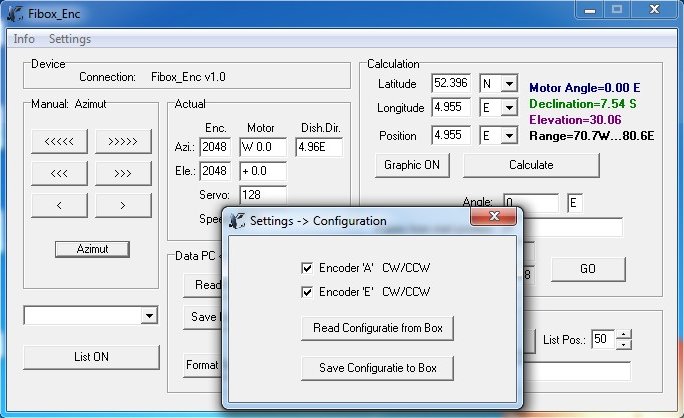
Reverse the encoders |
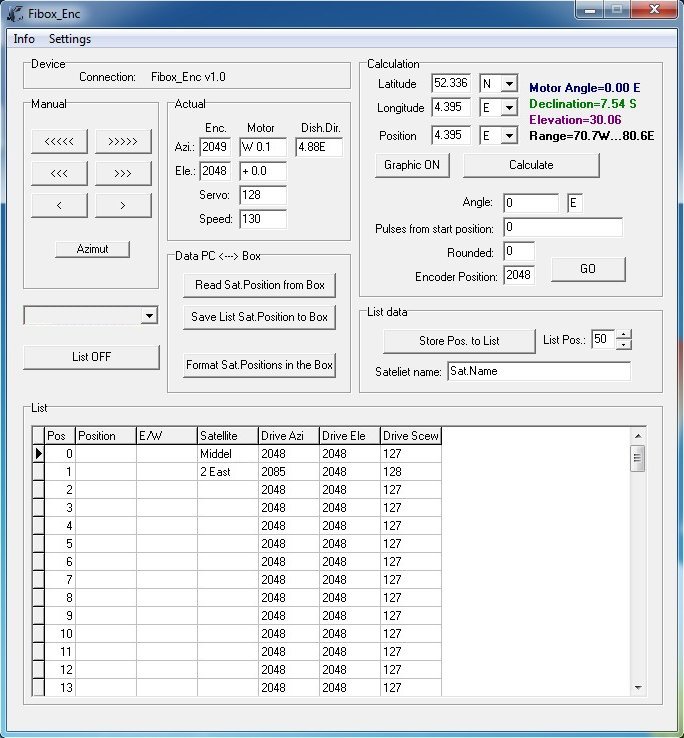
Edit the satellite list |
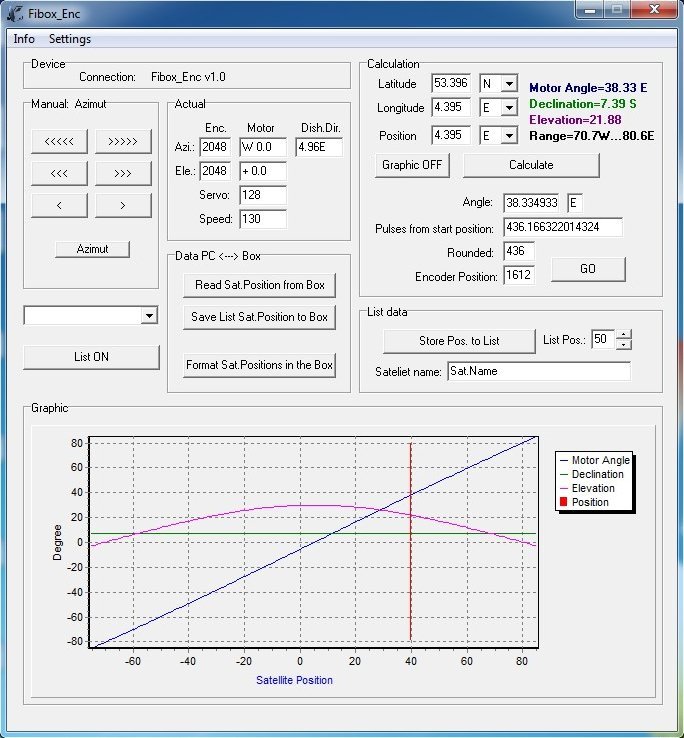
The graphic view |